| Journal Publications | ||||
|---|---|---|---|---|
2025 | 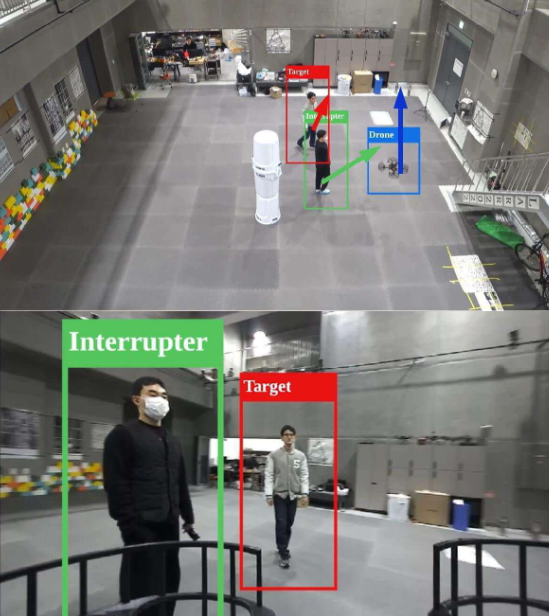 |
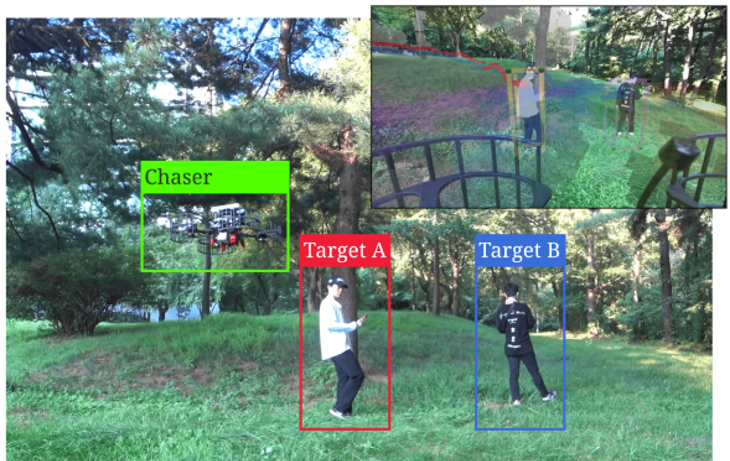
QP Chaser: Polynomial Trajectory Generation for Autonomous Aerial TrackingYunwoo Lee, Jungwon Park, Seungwoo Jung, Boseong Jeon, Dahyun Oh, H. Jin Kim IEEE Transactions on Automation Science and Engineering T-ASE 2025 Best Application Paper Award | ||
| A Survey on Collision Avoidance Algorithms for Multi-robot Systems Dahyun Oh, Yongjae Lim, Hoseong Jung, Jeongtae Huh, Jusuk Lee, Changhyun Choi, H Jin Kim, Jungwon Park International Journal of Control, Automation and Systems |
| ||
| Jungwon Park, Yunwoo Lee, Inkyu Jang, H Jin Kim The International Journal of Robotics Research |
| ||
| Yunwoo Lee, Jungwon Park, H Jin Kim IEEE Robotics and Automation Letters |
| ||
2024 | | BPMP-Tracker: A versatile aerial target tracker using Bernstein polynomial motion primitives Yunwoo Lee, Jungwon Park, Boseong Jeon, Seungwoo Jung, H Jin Kim IEEE Robotics and Automation Letters |
| |
2023 | | Jungwon Park, Yunwoo Lee, Inkyu Jang, H. Jin Kim IEEE Transactions on Robotics |
| |
| 2022 |  | Jungwon Park, Dabin Kim, Gyeong Chan Kim, Dahyun Oh, H. Jin Kim IEEE Robotics and Automation Letters | ||
2021 |
| Autonomous Aerial Dual-target Following among Obstacles Boseong Felipe Jeon, Yunwoo Lee, Jeongjun Choi, Jungwon Park, H. Jin Kim IEEE Access | ||
2020 |
| Jungwon Park, H. Jin Kim IEEE Robotics and Automation Letters | ||
| Conference Proceedings | ||||
| 2023 |  |
Safe and Distributed Multi-Agent Motion Planning under Minimum Speed Constraints Inkyu Jang, Jungwon Park, H. Jin Kim 2023 IEEE International Conference on Robotics and Automation (ICRA) | ||
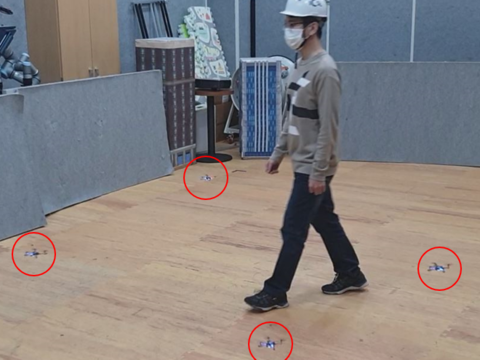
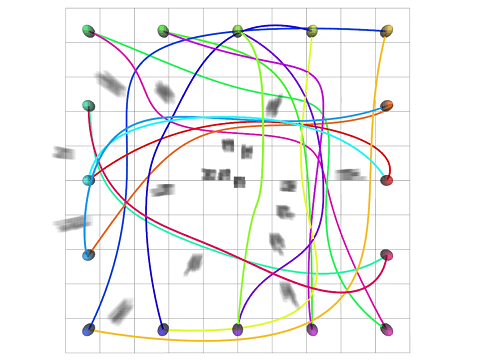
| Decentralized Deadlock-free Trajectory Planning for Quadrotor Swarm in Obstacle-rich Environments Jungwon Park, Inkyu Jang, H. Jin Kim 2023 IEEE International Conference on Robotics and Automation (ICRA) Top Prize in Korea Aerospace Industries (KAI) Aerospace Paper Award | |||
2021 | 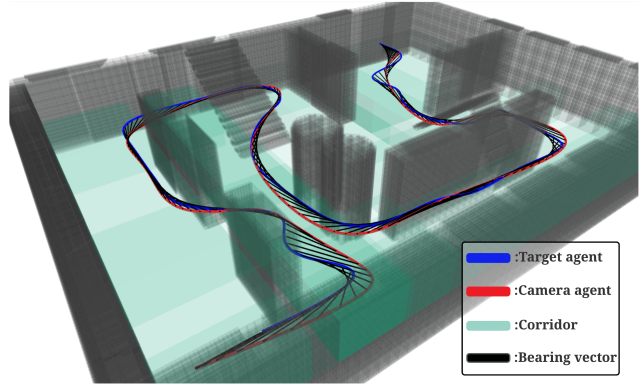 | Target-visible Polynomial Trajectory Generation within an MAV TeamYunwoo Lee, Jungwon Park, Boseong Jeon, H. Jin Kim 2021 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) | ||
2020 |
| Jungwon Park, Junha Kim, Inkyu Jang, H. Jin Kim 2020 IEEE International Conference on Robotics and Automation (ICRA) Multi-Robot Systems Award Finalist in ICRA 2020 | ||
2019 |
| Jungwon Park, H. Jin Kim 2019 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) | ||